我想通过球体表面上的色彩映射使用Matplotlib绘制数据.另外,我想添加一个3D线图.我到目前为止的代码是这样的:
import matplotlib import matplotlib.pyplot as plt from mpl_toolkits.mplot3d import Axes3D import numpy as np NPoints_Phi = 30 NPoints_Theta = 30 radius = 1 pi = np.pi cos = np.cos sin = np.sin phi_array = ((np.linspace(0, 1, NPoints_Phi))**1) * 2*pi theta_array = (np.linspace(0, 1, NPoints_Theta) **1) * pi phi, theta = np.meshgrid(phi_array, theta_array) x_coord = radius*sin(theta)*cos(phi) y_coord = radius*sin(theta)*sin(phi) z_coord = radius*cos(theta) #Make colormap the fourth dimension color_dimension = x_coord minn, maxx = color_dimension.min(), color_dimension.max() norm = matplotlib.colors.Normalize(minn, maxx) m = plt.cm.ScalarMappable(norm=norm, cmap='jet') m.set_array([]) fcolors = m.to_rgba(color_dimension) theta2 = np.linspace(-np.pi, 0, 1000) phi2 = np.linspace( 0 , 5 * 2*np.pi , 1000) x_coord_2 = radius * np.sin(theta2) * np.cos(phi2) y_coord_2 = radius * np.sin(theta2) * np.sin(phi2) z_coord_2 = radius * np.cos(theta2) # plot fig = plt.figure() ax = fig.gca(projection='3d') ax.plot(x_coord_2, y_coord_2, z_coord_2,'k|-', linewidth=1 ) ax.plot_surface(x_coord,y_coord,z_coord, rstride=1, cstride=1, facecolors=fcolors, vmin=minn, vmax=maxx, shade=False) fig.show()
此代码生成如下所示的图像: 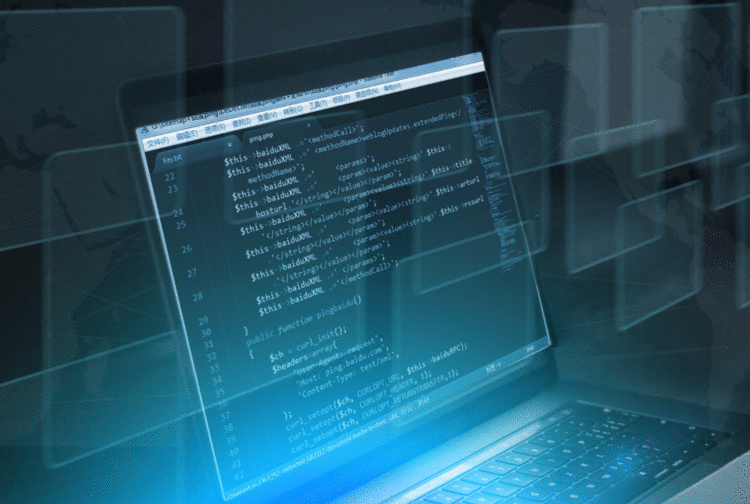 这几乎是我想要的.但是,当黑色线条在背景中时,黑色线条应该被表面图块遮挡,而当它位于前景时,黑色线条应该是可见的.换句话说,黑线不应该"透过"球体.
这几乎是我想要的.但是,当黑色线条在背景中时,黑色线条应该被表面图块遮挡,而当它位于前景时,黑色线条应该是可见的.换句话说,黑线不应该"透过"球体.
这可以在Matplotlib中完成而不使用Mayavi吗?
问题是matplotlib没有光线跟踪器,它并没有真正设计成具有3D功能的绘图库.因此,它适用于2D空间中的层系统,并且对象可以位于更靠前或更靠后的层中.可以使用zorder大多数绘图函数的关键字参数进行设置.然而,在matplotlib中没有关于对象是在3D空间中的另一个对象的前面还是后面的意识.因此,您可以使整条线可见(在球体前面)或隐藏(在它后面).
解决方案是计算自己应该可见的点.我在这里谈论点,因为一条线将"穿过"球体连接可见点,这是不需要的.因此,我限制自己绘制积分 - 但如果你有足够的积分,它们看起来像一条线:-).或者,可以通过nan在不连接的点之间使用附加坐标来隐藏线; 我限制自己在这里要点,不要让解决方案变得比它需要的更复杂.
对于一个完美的球体来说,计算哪些点应该是可见的并不太难,这个想法如下:
获取3D绘图的视角
由此,在视图方向的数据坐标中计算到视平面的法向矢量.
计算此法线向量(X在下面的代码中调用)和线点之间的标量积,以便使用此标量积作为是否显示点的条件.如果标量乘积小于0那么,从观察者看,相应的点位于观察平面的另一侧,因此不应显示.
按条件过滤点.
然后,另一个可选任务是在用户旋转视图时调整针对该情况示出的点.这是通过motion_notify_event基于新设置的视角连接到使用上面的过程更新数据的功能来实现的.
请参阅下面的代码,了解如何实现此目的.
import matplotlib
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
import numpy as np
NPoints_Phi = 30
NPoints_Theta = 30
phi_array = ((np.linspace(0, 1, NPoints_Phi))**1) * 2*np.pi
theta_array = (np.linspace(0, 1, NPoints_Theta) **1) * np.pi
radius=1
phi, theta = np.meshgrid(phi_array, theta_array)
x_coord = radius*np.sin(theta)*np.cos(phi)
y_coord = radius*np.sin(theta)*np.sin(phi)
z_coord = radius*np.cos(theta)
#Make colormap the fourth dimension
color_dimension = x_coord
minn, maxx = color_dimension.min(), color_dimension.max()
norm = matplotlib.colors.Normalize(minn, maxx)
m = plt.cm.ScalarMappable(norm=norm, cmap='jet')
m.set_array([])
fcolors = m.to_rgba(color_dimension)
theta2 = np.linspace(-np.pi, 0, 1000)
phi2 = np.linspace( 0, 5 * 2*np.pi , 1000)
x_coord_2 = radius * np.sin(theta2) * np.cos(phi2)
y_coord_2 = radius * np.sin(theta2) * np.sin(phi2)
z_coord_2 = radius * np.cos(theta2)
# plot
fig = plt.figure()
ax = fig.gca(projection='3d')
# plot empty plot, with points (without a line)
points, = ax.plot([],[],[],'k.', markersize=5, alpha=0.9)
#set initial viewing angles
azimuth, elev = 75, 21
ax.view_init(elev, azimuth )
def plot_visible(azimuth, elev):
#transform viewing angle to normal vector in data coordinates
a = azimuth*np.pi/180. -np.pi
e = elev*np.pi/180. - np.pi/2.
X = [ np.sin(e) * np.cos(a),np.sin(e) * np.sin(a),np.cos(e)]
# concatenate coordinates
Z = np.c_[x_coord_2, y_coord_2, z_coord_2]
# calculate dot product
# the points where this is positive are to be shown
cond = (np.dot(Z,X) >= 0)
# filter points by the above condition
x_c = x_coord_2[cond]
y_c = y_coord_2[cond]
z_c = z_coord_2[cond]
# set the new data points
points.set_data(x_c, y_c)
points.set_3d_properties(z_c, zdir="z")
fig.canvas.draw_idle()
plot_visible(azimuth, elev)
ax.plot_surface(x_coord,y_coord,z_coord, rstride=1, cstride=1,
facecolors=fcolors, vmin=minn, vmax=maxx, shade=False)
# in order to always show the correct points on the sphere,
# the points to be shown must be recalculated one the viewing angle changes
# when the user rotates the plot
def rotate(event):
if event.inaxes == ax:
plot_visible(ax.azim, ax.elev)
c1 = fig.canvas.mpl_connect('motion_notify_event', rotate)
plt.show()
在最后一个可能不得不打了一下用markersize,alpha以获得最大的视觉吸引力结果出这和点数.
 京公网安备 11010802040832号 | 京ICP备19059560号-6
京公网安备 11010802040832号 | 京ICP备19059560号-6 